#LC1368. 使网格图中至少有一条有效路径的最小代价
-
ID: 19466
传统题
1000ms
128MiB
尝试: 1
已通过: 1
难度: 10
上传者:
使网格图中至少有一条有效路径的最小代价
使网格图中至少有一条有效路径的最小代价
题目描述
在一个 的网格图 grid 中,每个单元格都有一个初始的指示箭头,表示你位于该单元格时应当移动到的相邻单元格。
grid[i][j] 的值及其代表的方向:
1:向右移动(至grid[i][j + 1])2:向左移动(至grid[i][j - 1])3:向下移动(至grid[i + 1][j])4:向上移动(至grid[i - 1][j])
箭头可能指向网格外部。你最开始位于左上角单元格 。一条 有效路径 是指从起点出发,沿着箭头方向移动,最终到达右下角单元格 的序列。
在移动过程中,你可以花费 1 单位代价 修改任意单元格中的箭头方向。你可以将箭头改为四个方向中的任意一个,且修改后的方向永久生效。
请计算:使网格图中至少存在一条能够从起点到达终点的有效路径,所需的最小代价。
输入格式
第一行包含两个整数 和 ,表示网格的行数和列数。
接下来 行,每行包含 个以空格分隔的整数,表示 grid[i][j] 的初始方向值。
输出格式
输出一个整数,表示所需的最小总代价。
输入输出样例
样例 1 (示例 1)
输入:
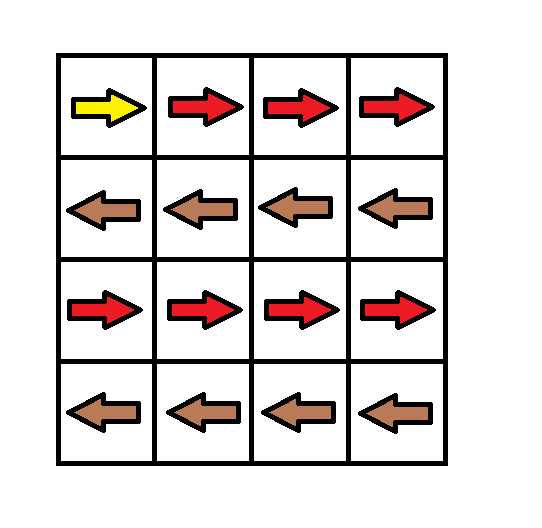
4 4
1 1 1 1
2 2 2 2
1 1 1 1
2 2 2 2
输出:
3
样例 2 (示例 2)
输入:
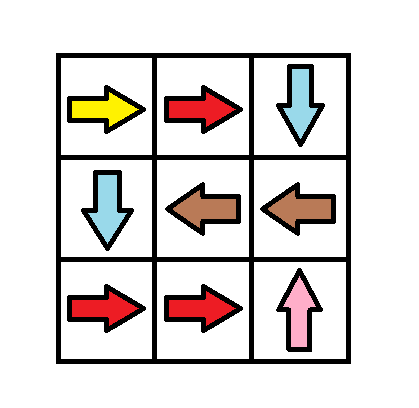
3 3
1 1 3
3 2 2
1 1 4
输出:
0
样例 3 (示例 3)
输入:
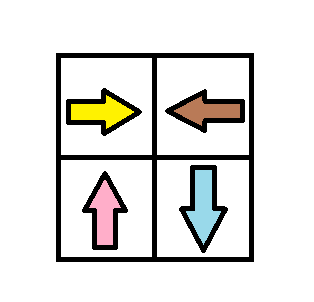
2 2
1 2
4 3
输出:
1
样例 4 (示例 4)
输入:
2 3
2 2 2
2 2 2
输出:
3
样例 5 (示例 5)
输入:
1 1
4
输出:
0
1. 预备知识点
- 单源最短路 (SSSP):将修改代价抽象为边权,求解起点到终点的最小代价。
- 0-1 广度优先搜索 (0-1 BFS):处理图中边权仅为 0 和 1 的特殊最短路算法,效率优于优先队列 Dijkstra。
- 双端队列 (std::deque):0-1 BFS 的核心。当边权为 0 时,将新状态插入队首;边权为 1 时,插入队尾。
- 图论建模:将网格每个单元格视为节点,原本指向的方向边权为 0,其他方向边权为 1。
2. 启发式思路引导(草稿纸推理)
第一步:路径分析
我们站在格子 (r, c)。
- 如果我们顺着
grid(r, c)指向的方向走,不花钱(代价为 0)。 - 如果我们想往其他三个方向走,必须花钱修改箭头(代价为 1)。
第二步:建模抽象
- 节点:网格中的每个坐标 。
- 边:每个节点向上下左右四个邻居连边。
- 权值:
- 若邻居的方向与当前格子箭头方向一致,边权 。
- 若邻居的方向与当前格子箭头方向不一致,边权 。
第三步:算法选择
- 这是一个典型的最短路问题。
- 由于边权只有 0 和 1,我们可以使用 0-1 BFS。
- 0-1 BFS 保证了:从队首弹出的节点,其
dist一定是当前已知的最小值,且队列中的dist保持单调递增(由于新增加的权值只有 0 或 1)。
第四步:复杂度思考
- 节点数 。
- 边数 。
- 0-1 BFS 复杂度 ,约为 次操作,在 NOI 1s 时限内极速运行。
3. 算法逻辑流程图 (Mermaid)
graph TD
A["开始: 初始化距离矩阵 dist 全部为无穷大"] --> B["设置 dist(0,0) 等于 0, 将坐标加入双端队列 DQ"]
B --> C{"DQ 是否为空?"}
C -- "是" --> D["输出最终结果 dist(m-1,n-1)"]
C -- "否" --> E["从 DQ 队首取出当前点 (r, c)"]
E --> F["循环 4 个方向 dir 等于 1,2,3,4"]
F --> G["计算新坐标 (nr, nc)"]
G --> H{"(nr, nc) 是否在界内?"}
H -- "否" --> F
H -- "是" --> I["判断代价 w: 若初始方向 grid(r,c) 等于 dir 则 w 等于 0, 否则 w 等于 1"]
I --> J{"dist(r,c) 加 w 是否小于当前的 dist(nr,nc)?"}
J -- "否" --> F
J -- "是" --> K["更新 dist(nr,nc) 等于 dist(r,c) 加 w"]
K --> L{"w 是否等于 0?"}
L -- "是" --> M["将新坐标 (nr, nc) 插入 DQ 队首"]
L -- "否" --> N["将新坐标 (nr, nc) 插入 DQ 队尾"]
M --> F
N --> F
F -- "遍历完所有方向" --> C
4. 读题关键词与坑点总结
- “最小代价”:最短路算法的核心关键词。
- “1, 2, 3, 4 对应方向”:
- 在定义方向数组时,务必与题目顺序一致。
- 建议定义:
int dr[] = {0, 0, 0, 1, -1}; int dc[] = {0, 1, -1, 0, 0};。 - 这样
dr[grid[i][j]]就能直接取出对应的坐标偏移。
- “0-1 权值”:看到权值只有 0 和 1 且求最短路,一定要反映出 0-1 BFS (Deque)。
- “终点到达”: 或 的边界情况,Dijkstra 或 0-1 BFS 均能自然处理。
- 空间限制: 的
int矩阵仅占用约 40KB,完全不必担心内存溢出。
5. 时间复杂度优化建议
- 对于 级别,
std::deque性能极佳。 - 如果在更大型的题目(如 )中,可以使用手写双端队列(用数组模拟指针)来进一步提升常数效率。
- 在松弛操作时,如果
dist[nr][nc]已经被更新过且新路径不优,直接跳过。